


Wyniki testów silnika serwo do napędu bezpośredniego oraz motoreduktora serwo pokazują, że w praktyce istnieje kilka znaczących różnic pomiędzy obydwoma rozwiązaniami.
Artykuł opisuje test motoreduktora serwo oraz silnika serwo do napędu bezpośredniego, przeprowadzony przy użyciu tego samego obciążenia, profilu ruchu oraz elementów montażowych. Test symulował zastosowania tych dwóch napędów w świecie rzeczywistym, zaś celem było określenie, czy zalety wydajności napędu bezpośredniego przewyższają jego wyższe koszty początkowe (w części 1 tego artykułu opisano zmniejszanie luzu kątowego oraz zwiększanie sztywności skrętnej w serwonapędach).
Dla celów opisywanego testu wzięto pod uwagę następujące kryteria:
■ Dokładność pozycjonowania
■ Luz kątowy
■ Czas ustalania się odpowiedzi na wymuszenie
■ Koszt maszyn oraz czas zwrotu z inwestycji
■ Złożoność konstrukcji
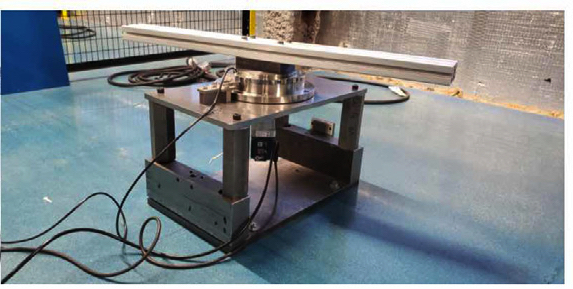
Dla celów testu stworzono system serwo, który był reprezentatywny dla aplikacji obrotowego stołu indeksującego o wysokiej inercji. Wybrano taką inercję obciążenia, wartość uśrednioną (RMS) momentu obrotowego oraz wymagania dotyczące prędkości obrotowej, aby motoreduktor oraz silnik do napędu bezpośredniego pracowały w pobliżu swoich znamionowych wartości granicznych. Aby zmierzyć dokładność pozycjonowania oraz czas cyklu tej symulowanej „maszyny”, do obciążenia przymocowano enkoder zewnętrzny, który precyzyjnie mierzył położenie samego obciążenia. Enkoder ten nie był wykorzystany jako element pętli sprzężenia zwrotnego, jedynie zaś jako niezależne narzędzie pomiarowe dla celów testu. Różnice w wydajności obydwu napędów zostały określone ilościowo przy wykorzystaniu danych zebranych zarówno z enkoderów silników, jak i sygnału zwrotnego z enkodera pierścieniowego po stronie obciążenia.

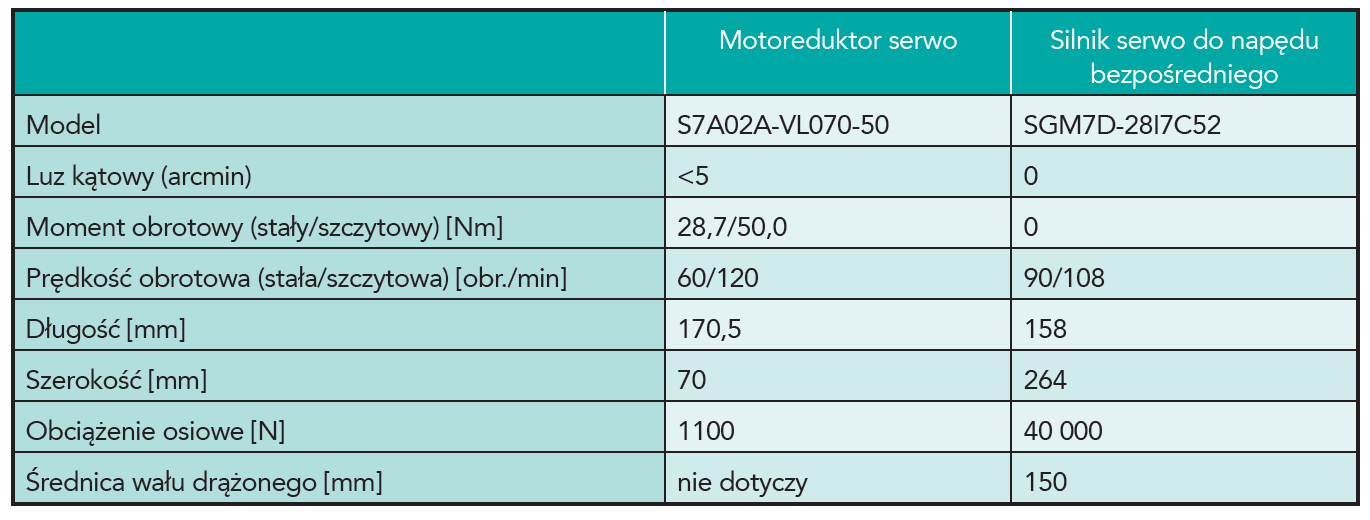
Przed zaprojektowaniem rzeczywistego sprzętu testowego wybrano dla celów porównawczych motoreduktor serwo oraz silnik serwo do napędu bezpośredniego. Wybrano takie typy silników, ponieważ redukcja prędkości obrotowej 50:1 daje motoreduktorowi moment obrotowy, prędkość obrotową i gabaryty porównywalne z silnikiem do napędu bezpośredniego, jak zestawiono w tabeli 1. Na podstawie tych danych można stwierdzić, że oba rodzaje silników mogą być porównane ze sobą podczas sterowania nową maszyną.
Po wybraniu silników oraz profilu ruchu za pomocą oprogramowania do doboru serwonapędów wyznaczono taką inercję obciążenia, aby wymusić pracę obydwu silników niemal w pobliżu ich znamionowych wartości granicznych, zapewniając, że żaden z nich nie będzie ani przewymiarowany, ani niedowymiarowany dla tej aplikacji. Jako profil ruchu wybrano trapezoidalny indeksujący obrót o kąt 45 stopni w czasie 200 ms, po którym następuje czas postoju równy 300 ms. Jest to profil podobny do tego, który można zobaczyć na dużym stole indeksującym podczas montażu, kontroli jakości czy pakowania wyrobów. Ten profil ruchu można przedstawić graficznie jak na rysunku 1.
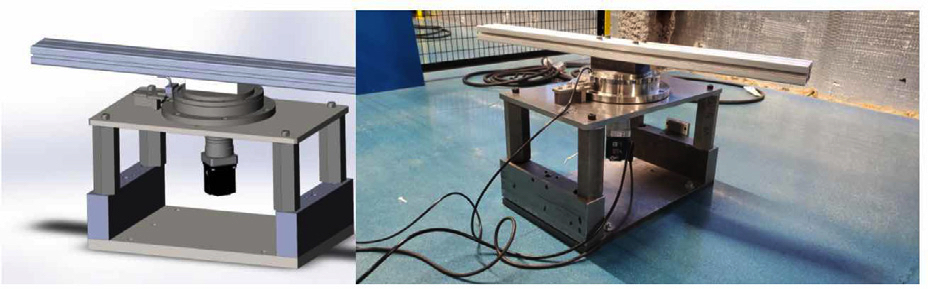
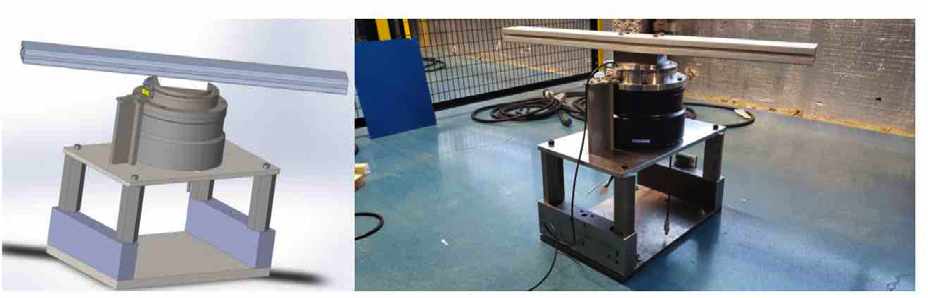
Wykorzystując docelową wartość inercji obciążenia jako kryterium projektowe, wyznaczono obciążenie zastępcze, które spowodowałoby pracę obydwu silników w pobliżu ich wartości granicznych RMS momentu obrotowego oraz umożliwiało przymocowanie zewnętrznego enkodera pierścieniowego. Rysunek 2 pokazuje układ testowy z motoreduktorem, a rysunek 3 układ testowy z napędem bezpośrednim.
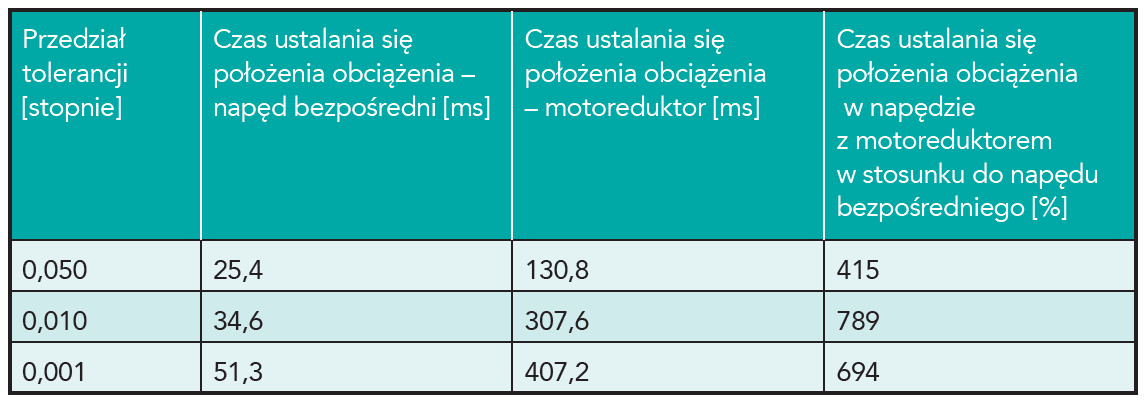
Dla celów tego testu definiuje się średni czas ustalania odpowiedzi obciążenia jako czas, który upływa pomiędzy zakończeniem sygnału wymuszenia ruchu a ustaleniem się położenia obciążenia w przedziale tolerancji położenia docelowego. Jak pokazano w tabeli 2, obciążenie napędzane bezpośrednio przez silnik ustalało przeciętnie swoje położenie znacznie szybciej, niż gdy było napędzane przez motoreduktor.
Druga z wartości porównawczych, całkowity czas ruchu, jest tu definiowana jako czas, który upłynął pomiędzy rozpoczęciem ruchu po wymuszeniu, a ustaleniem się położenia obciążenia w przedziale tolerancji położenia docelowego. Całkowity czas ruchu jest sumą czasu ruchu po wymuszeniu i czasu ustalania się położenia. W tabeli pokazano, że serwonapęd bezpośredni ma krótszy czas ruchu od napędu z motoreduktorem, pomimo posiadania takiego samego profilu ruchu wymuszanego.
Czasy ustalania się położenia obciążenia stają się bardziej znaczące dla pracy maszyn z krótszymi czasami cyklu. W opisywanym teście nawet konserwatywny czas cyklu równy 500 ms, przy czasie ruchu równym 200 ms, daje robiące wrażenie porównanie.
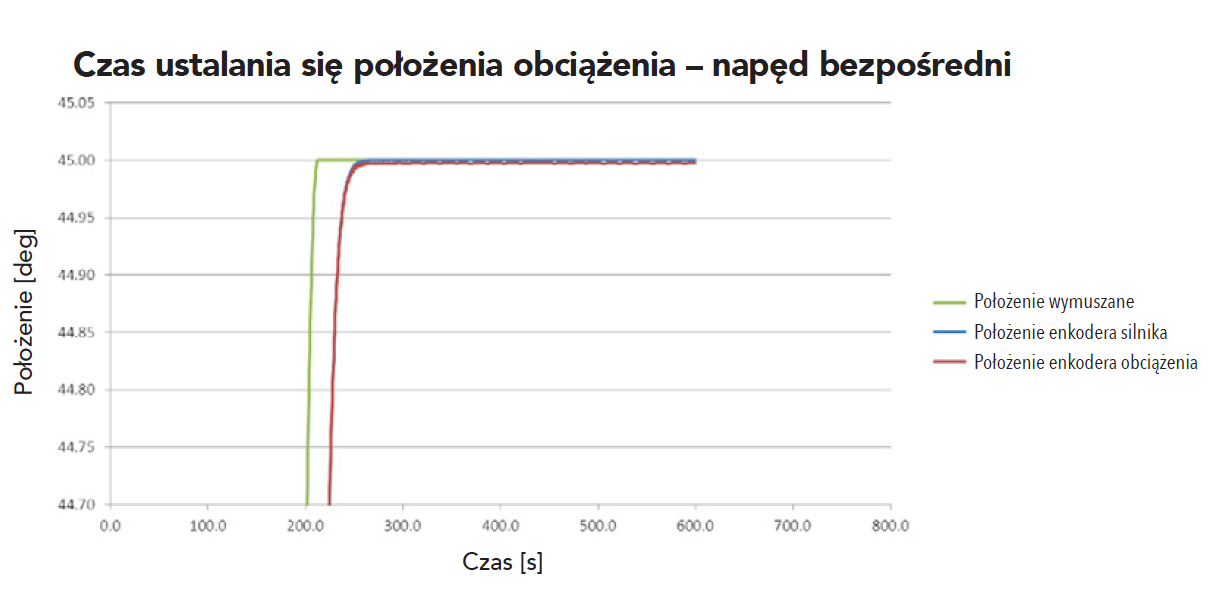
Rysunki 4 i 5 obrazują oscylacje położenia obciążenia, które występują na końcu ruchu, zarówno przy napędzie za pomocą motoreduktora, jak i bezpośrednim. Motoreduktor wykazał tłumione oscylacje na końcu ruchu, typowe dla tej konfiguracji mechanicznej, natomiast napęd bezpośredni dosłownie żadnych. Ta różnica w amplitudzie oraz czasie drgań została zaobserwowana jednakowo podczas wszystkich testów.
Widoczne oscylacje oraz dodatkowy czas ustalania się położenia obciążenia w napędzie z motoreduktorem są przypisywane połączeniu luzu kątowego oraz skończonej wartości sztywności skrętnej, istniejących w przekładni. W rzeczywistości luz kątowy jest widoczny na rys. 4 jako położenie obciążenia wyprzedzające położenie enkodera podczas większości ruchu hamującego przed odskoczeniem i oscylacjami. Elementy przekładni są blokowane w punkcie tolerancji mechanicznej przy obrocie do przodu podczas przyśpieszania, a następnie przesuwane do punktu tolerancji mechanicznej przy ruchu wstecz podczas hamowania.
Hamowanie, w połączeniu ze sztywnością skrętną, skutecznie działa jak sprężyna, powodując że obciążenie podskakuje do tyłu i do przodu do chwili, aż siły tarcia i wewnętrzne straty energii nie zatrzymają tego ruchu. Silnik serwo usiłuje skompensować te oscylacje, jednak z powodu istnienia luzu kątowego większość oscylacji jest odsprzęgnięta od silnika i nie jest pokazywana jako błąd położenia przez enkoder silnika.
Warto ponadto zauważyć, że enkoder silnika pokazuje, iż obciążenie ustaliło swoje położenie znacznie szybciej, niż to nastąpiło w rzeczywistości. Jeśli realizowany proces technologiczny wymaga, aby obciążenie ustalało swoje położenia z mniejszą tolerancją, niż jest osiągana w sytuacji, gdy silnik serwo sygnalizuje, iż osiągnął już położenie docelowe, to może być wymagane zastosowanie czasowych układów opóźniających. Te timery dodają marnowany czas do profilu ruchu, ponieważ okres opóźnienia musi być wystarczająco konserwatywny, aby pozostał efektywny w całym szerokim zakresie warunków operacyjnych.
Silnik serwo z napędem bezpośrednim daje znacznie bardziej bezpośrednie spojrzenie na rzeczywisty ruch obciążenia, a zatem sygnał sprzężenia zwrotnego z enkodera jest wystarczający do optymalnej realizacji sekwencji ruchów maszyny, bez dodatkowych układów czasowych. Innym rozwiązaniem mogłoby być użycie zewnętrznego enkodera do pełnego zamknięcia pętli sterowania z obciążeniem, jednak wymaga to dodatkowego projektowania, użycia dodatkowych podzespołów, prac konserwacyjnych oraz materiałów. Te koszty dodają się do zestawienia materiałowego (BOM), tak więc mogą być najpoważniejszym czynnikiem zniechęcającym do wyboru takiego rozwiązania.
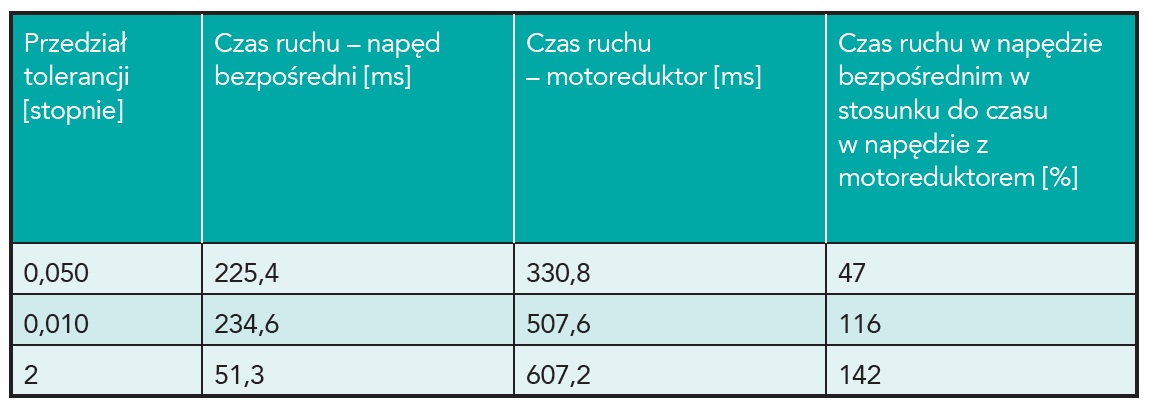
Podane w tabelach 2 i 3 procentowe porównania pokazują znacznie lepsze parametry silników serwo do napędu bezpośredniego, jednak w rzeczywistości silnik taki oszczędza kilkaset milisekund na jeden ruch. Ta mała różnica w stosunku do motoreduktora może wydawać się mało znacząca, jednak takie ułamki sekund dodają się do siebie w okresie eksploatacji maszyny, co już daje znaczący wynik.
Przeanalizujmy np. stół indeksujący posiadający osiem stanowisk. Stół ten obraca się o kąt 45 stopni w ciągu 200 milisekund (nominalnie) podczas każdego indeksowania. Po wykonaniu tego obrotu przez 300 milisekund jest realizowany kolejny proces, który kompletuje cykl. Stół musi ustalić swoje położenie kątowe w zakresie 0,05 stopnia, aby dany produkt był wytworzony poprawnie. Podczas każdego obrotu stołu wytwarzany jest produkt o wartości 0,05 USD, zaś maszyna pracuje 8 godzin dziennie.

W takiej sytuacji zwiększenie produkcji spowodowane wykorzystaniem serwonapędu bezpośredniego pozwoliłoby, aby koszty tego napędu zwróciły się w okresie krótszym od 14 dni, pomimo że system z napędem bezpośrednim jest znacznie droższy od systemu z motoreduktorem.
Można by przyjąć, że procesy technologiczne/produkcji nie wymagają dokładności przedziału tolerancji ustalania się położenia na poziomie 0,05 stopnia. Jednak na stole indeksującym o średnicy 5 stóp (1,52 m) tolerancja 0,05 deg pozwala na luz na obwodzie +/- 0,026″ (0,6604 mm) lub nieco mniej od 1/32 cala (0,79375 mm), w każdym z kierunków obrotu stołu. Patrząc z tej perspektywy, łatwo zrozumieć, że większość procesów wymaga przedziału tolerancji nawet węższego niż +/- 1/32 cala, aby były zrealizowane dokładnie, zaś taka tolerancja nie jest wcale nieracjonalna jako taka.
Porównując te trzy podstawowe rozwiązania serwonapędów do stołów indeksujących, to jest motoreduktor, napęd bezpośredni i motoreduktor z enkoderem zewnętrznym, dochodzimy do wniosku, że napęd bezpośredni oferuje najlepsze korzyści. Jak widać w przeprowadzonym teście, rozwiązanie z motoreduktorem nie jest w stanie konkurować z serwonapędem bezpośrednim pod względem dokładności pozycjonowania, luzu kątowego, czasu ustalania się położenia obciążenia oraz czasu cyklu.
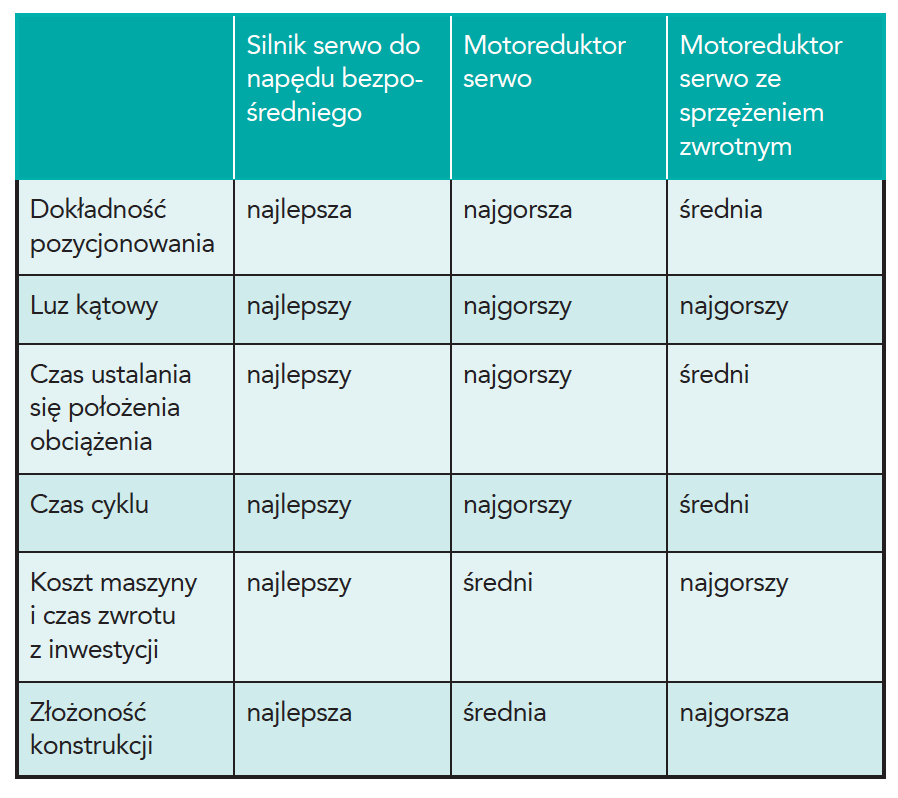
Motoreduktor z enkoderem zewnętrznym pod względem wydajności zbliżony jest do serwonapędu bezpośredniego, jednak dodatkowe koszty konstrukcji mechanicznej, instalowania, konserwacji oraz programowania systemu z pełnym sprzężeniem zwrotnym czynią go najbardziej nieatrakcyjnym cenowo oraz skomplikowanym technicznie.
Co prawda cena silnika serwo do napędu bezpośredniego może spowodować, że inżynierowie w firmie zaczną się zastanawiać nad sensem jego zakupu, jednak zalety tego rozwiązania pod względem wydajności oraz bardzo szybki wzrost produktywności czynią go najlepszą opcją wyboru dla szerokiej gamy aplikacji serwo z osią obrotową.
Część trzecia artykułu:
Silniki serwo do napędu bezpośredniego a motoreduktory serwo (część 3)
Bryan Knight jest menedżerem marketingu produktu, a Dakota Miller jest specjalistką ds. produktów automatyki w firmie Yaskawa America.


